If the drone loses connection during a mission, the resulting behavior depends on the execution engine.
Virtual Stick (default)
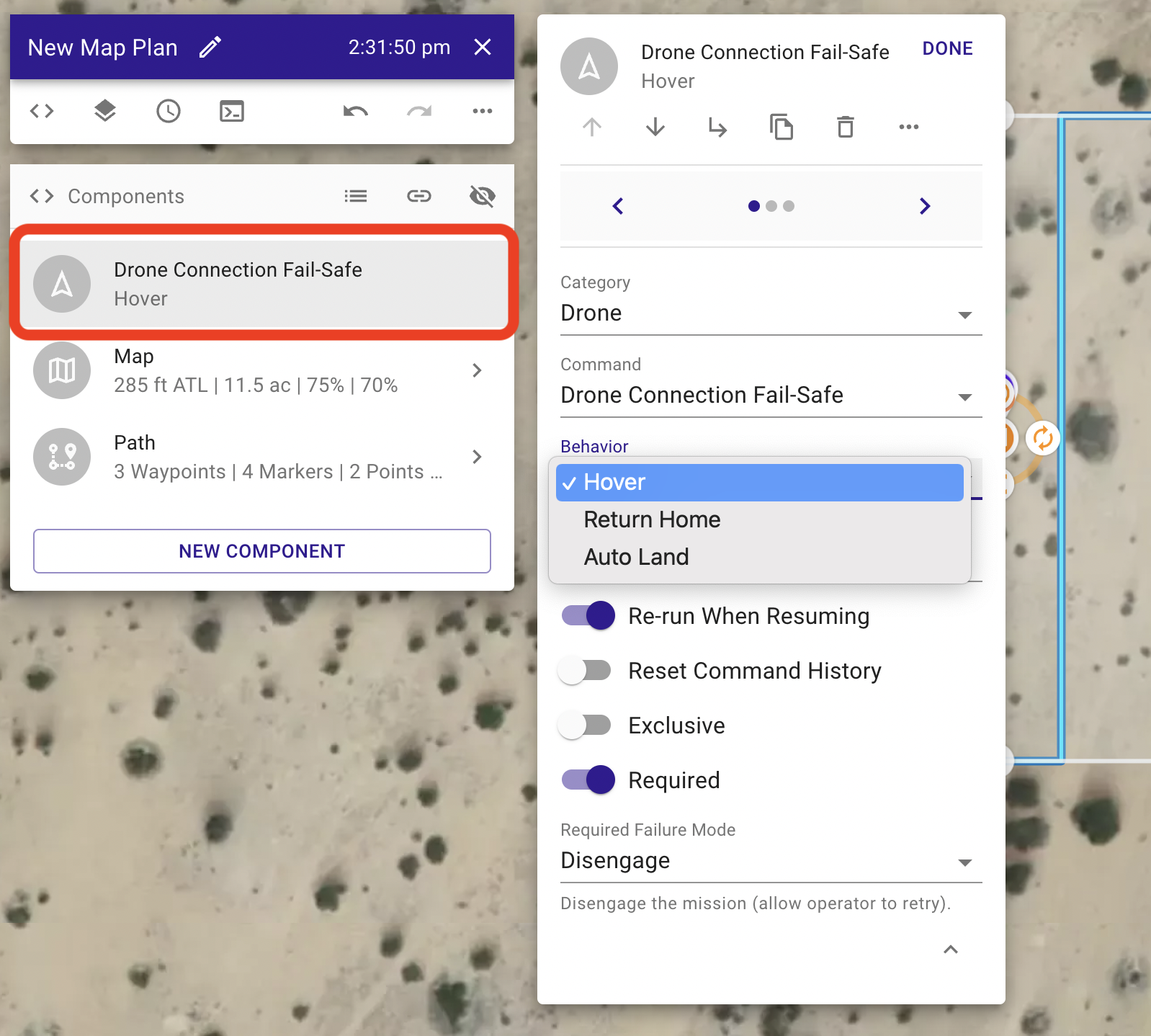
If you are running a standard Dronelink mission plan that uses virtual stick, you can configure DJI's connection fail-safe setting to hover in place, return to home, or automatically land.
This setting can be changed either:
(1) Manually through the user interface in DJI GO/FLY, or
(2) Automatically through a command component in your mission plan. The setting itself will survive switching apps and switching batteries.
Onboard Waypoints
If you are running an onboard-compatible Dronelink mission plan that only uses DJI Waypoint components, you can configure the signal loss behavior for each component:
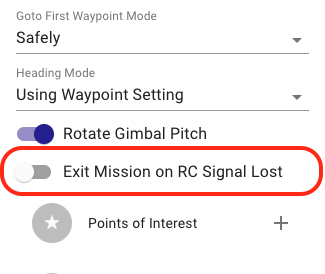
If you choose to exit the mission on RC signal loss, then the connection fail-safe setting (discussed above) will apply. Dronelink does require a connection between DJI Waypoint components as each component is uploaded as a separate mission to the drone and only one mission can be uploaded at once.
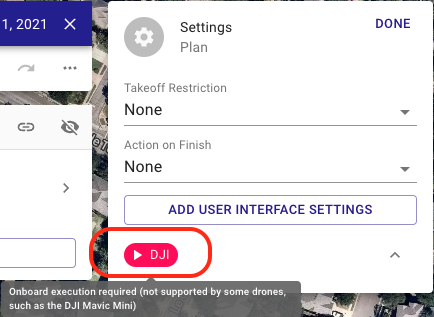
IMPORTANT: You can open the mission plan settings to determine if your mission plan is onboard-compatible. Mission plans that require onboard execution will be badged with the name of the required hardware vendor. This badge does not guarantee that your specific drone model supports onboard execution: