Waypoint missions
Hello!
My team and I are interested in using dronelink, but we have a few questions beforehand. I am hoping some of you guys will know if our ideas are achievable.
It might help to understand our project, so here is a brief overview:
We are hoping to load a grid of waypoints that are distributed across a stand of young trees (2-5 years old). Then fly the drone to every waypoint and gather a series of nadir photos and then a series of oblique photos. We can then create a small orthophoto and 3D model of each waypoint. This can be used to measure the young trees.
We have flown these entire stands at 200ft of altitude with varying degrees of success. But it is quite time-consuming and results in a massive amount of photos. We are hoping to find a way to make mini orthophotos at 30-50 AGL instead. It would save a lot of time and result in much higher resolution images.
Questions:
- We are interested in flying large waypoint missions. Can we upload a kml or csv files with our waypoints into dronelink?
- Can we assign an orbit to every waypoint in the flight, and then have the drone take photos during a timed interval while orbiting?
- Can we possibly assign 2 orbits or 2 different photo tasks at every waypoint? Ideally, we will have one small orbit taking nadir photos that will generate enough overlap for a small ortho. And then fly a second orbit with a wide radius to gather obliques for the 3D model. Or is there another way to take multiple nadir photos at each waypoint? Something like small grid of 4-10 photos?
- If we cannot fly both a set of nadir images and oblique images at each waypoint, one set should still work for us!
Thanks!
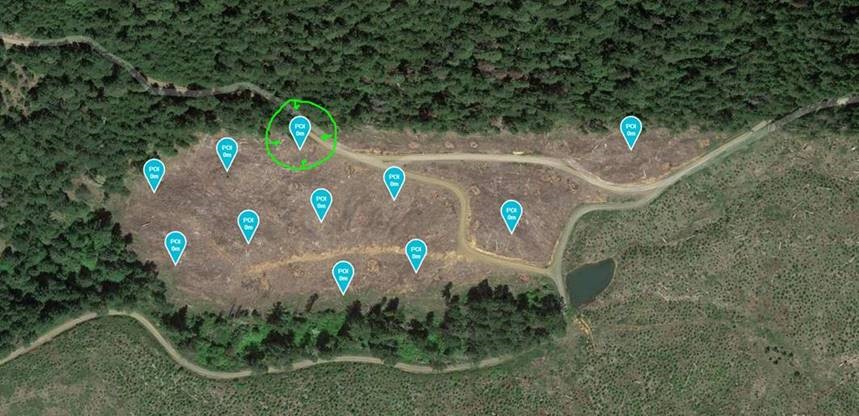
Here are some examples of what the project would look like:


Comments
2 comments
Yes, you can import a kml file as a boundary for a map component.
Dronelink works with components rather than waypoint actions. In this case, you would want to plan an Orbit component for each area of interest and yes, the orbit can be set to capture interval photos. Having said that, if you care about the overlaps, you can use the more advanced, Facade component type, to capture images based on math.
Again, similar to the answer above, you don't use waypoint actions. You can plan as many components per mission plan as you want.
It sounds like what you want is to just plan multiple, small map components at each area of interest.
Thank you for the response. This certainly sounds promising for our project. I'll dig a little more into the Facade component types especially.
Please sign in to leave a comment.