Default Speed When Mapping - Why So High?
Hello,
Not sure where this fits best, you decide and relocate as needed. Many thanks for all comments and thoughts.
- General Discussion - Why is the default mapping speed set so high?
- Feature Requests - Please consider using a slower speed as the default value. If there's a calculable default sweet spot for speed:altitude, consider initially auto populating Speed field predicated upon the value of Altitude, but allow user to change.
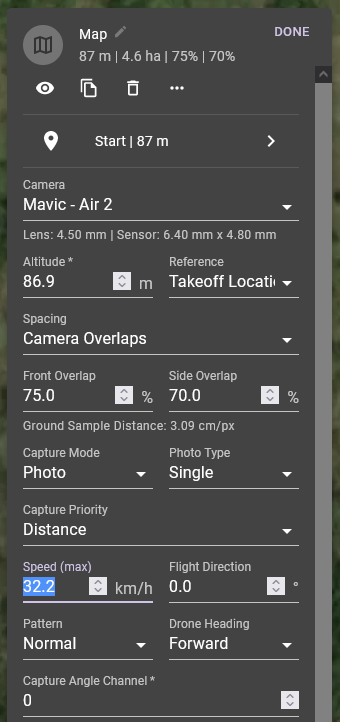
- Bug Reports - As it is presently (Dronelink v4.3.0), the default value is set at 32.2 km/hr, and creates significant blur at the target GSD.
Comments
5 comments
Most people want to fly faster with drones that have more capable sensors. If you don’t like these defaults, you can create a mission plan with a map component the way you like it, and then just always copy that mission plan as your starting point.
That sounds great! Can anybody provide an ortho map flown at 32 km/hr and at an altitude of 87m?
I use a Phantom 4 Pro v2 to capture a mission on a 400 acre site every two weeks. I run that at 26mph (42km/hr) at 400ft. I can't send it to you because the client would not allow that, but it works.
Because the P4P has a mechanical shutter, it is crystal clear every time. In wind the P4P camera has a habit of being blown sideways when flying quickly or, frankly, I would try even faster.
The Mavic 3 Enterprise - the default mapping on that something like 33mph.
That sounds very cool indeed! Absolutely amazing! Thanks for commenting.
So then does the so-called rolling shutter not apply with your P4P2?
I've never had a problem with rolling shutter on the P4P V2. It's why it's the go to drone for a lot of people that do mapping and why it was such a big deal when the M3E came out with that included.
Please sign in to leave a comment.